computer and computer
file download address : https://drive.google.com/file/d/1W2DXekXXTdaQqccRKhFuXDd1bJ4poh4D/view?usp=sharing
process explanation
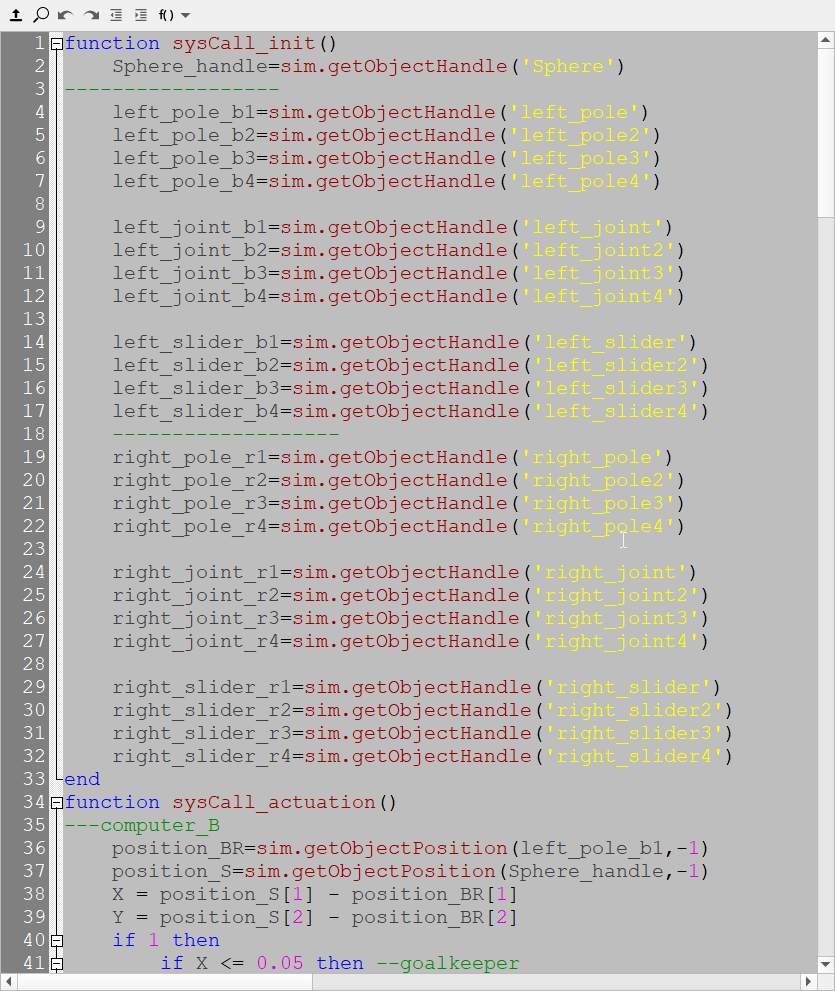
以上圖所示:
sim.getOjectHandle (' ') 是指處理物件的相關。
以上方所有圖示:
下方程式為 goal keeper 的部分
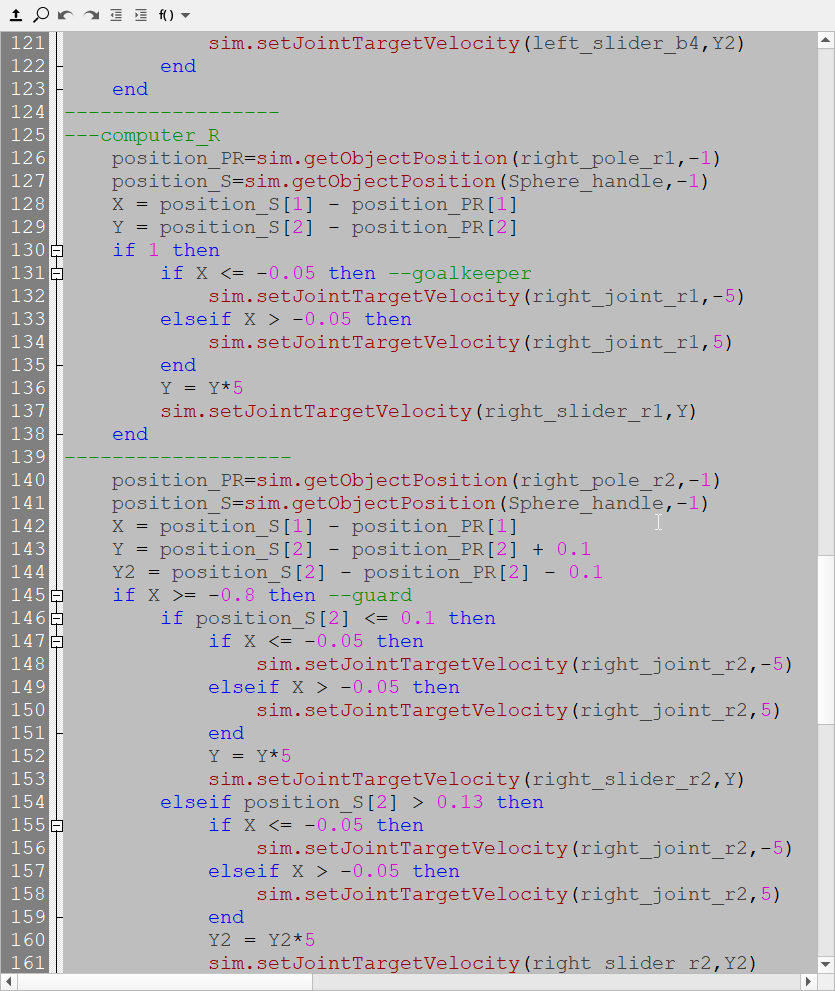
position_PR=sim.getObjectPosition(right_pole_r1,-1)
position_S=sim.getObjectPosition(Sphere_handle,-1)
X = position_S[1] - position_PR[1]
Y = position_S[2] - position_PR[2]
if 1 then
if X <= -0.05 then --goalkeeper
sim.setJointTargetVelocity(right_joint_r1,-5)
elseif X > -0.05 then
sim.setJointTargetVelocity(right_joint_r1,5)
end
Y = Y*5
sim.setJointTargetVelocity(right_slider_r1,Y)
end
桿子位置 = 模擬得到物件位置(處理的物件 , -1啟動)。
球的位置 = 模擬得到物件位置(處理的物件 , -1啟動)。
X = 球的位置 - 桿件的位置 (在X軸上)。
Y = 球的位置 - 桿件的位置 (在Y軸上)。
if (假設 1 = true) then (接著)
[ if (假設X <= -0.05) 接著
模擬設定軸的目標速度 ( 處理後的物件 , 速度大小(負號是指方向))
elseif (額外假設 X > -0.05) 接著
模擬設定軸的目標速度 (處理後的物件 , 速度大小)
end (結束此迴圈) ]
Y = 上方 Y軸的位置差 * 上5倍
模擬設定軸的目標速度 (處理後的物件 , 為上方 Y 的追蹤速度)
end (結束迴圈)。
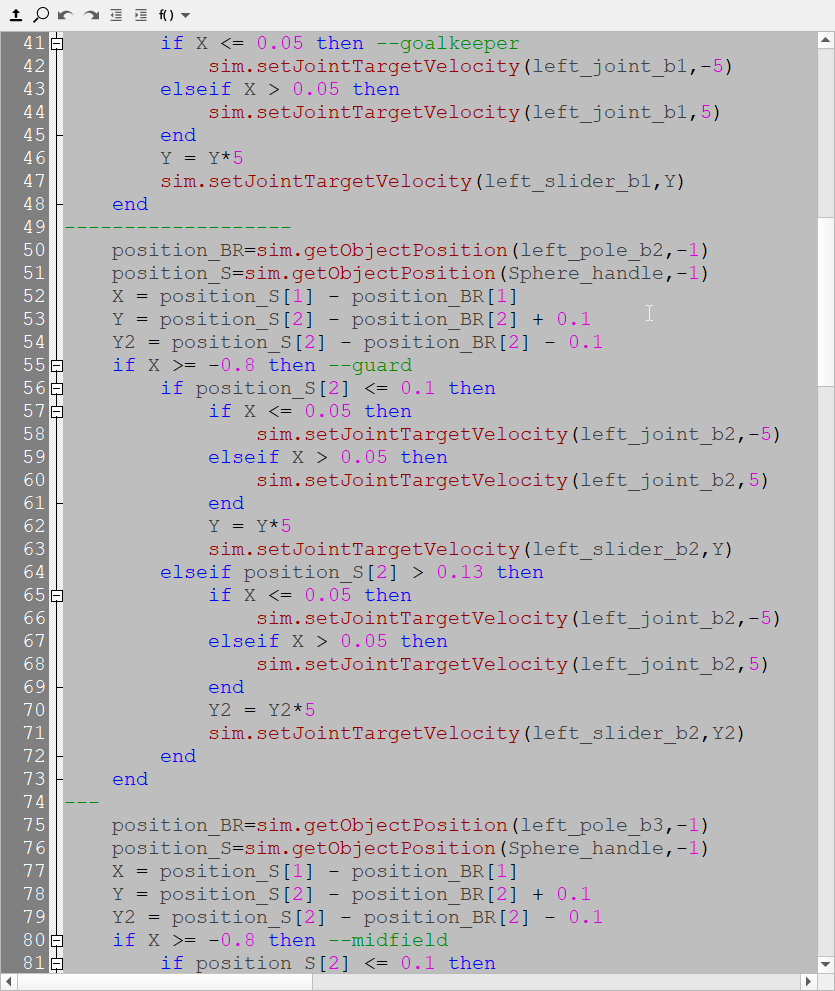
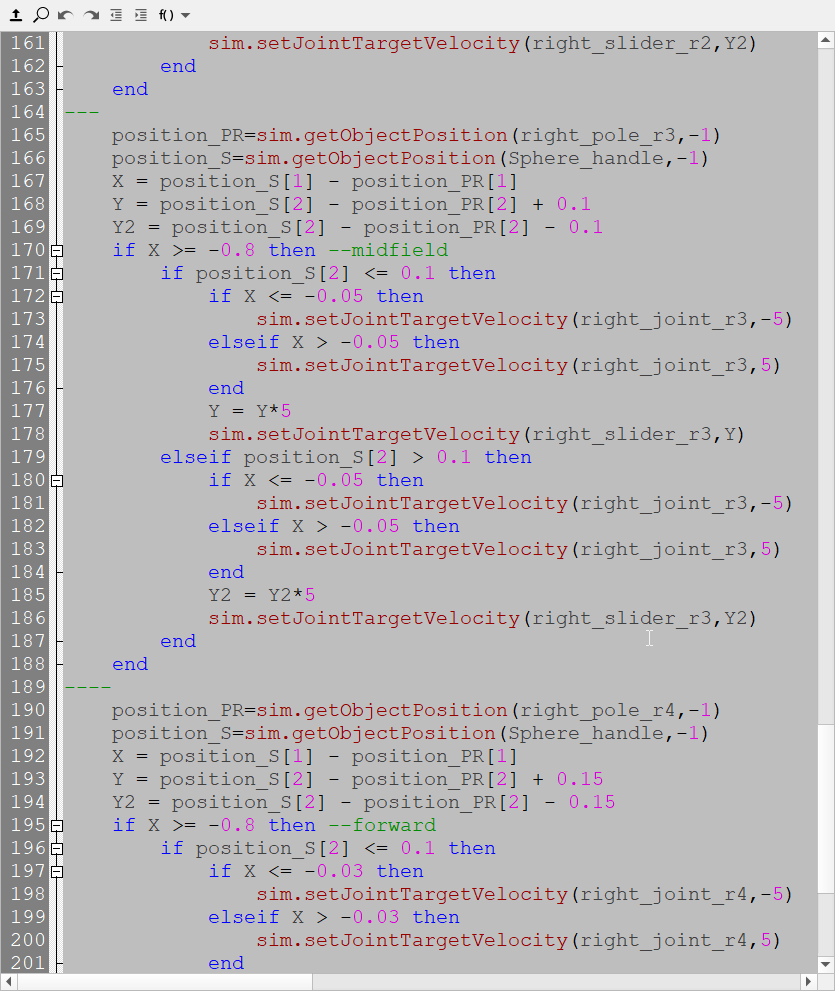
下方程式包刮 (guard midfield forward)的部分
position_PR=sim.getObjectPosition(right_pole_r2,-1)
position_S=sim.getObjectPosition(Sphere_handle,-1)
X = position_S[1] - position_PR[1]
Y = position_S[2] - position_PR[2] + 0.1
Y2 = position_S[2] - position_PR[2] - 0.1
if X >= -1 then --goalkeeper
if position_S[2] <= 0.1 then
if X <= -0.05 then
sim.setJointTargetVelocity(right_joint_r2,-5)
elseif X > -0.05 then
sim.setJointTargetVelocity(right_joint_r2,5)
end
Y = Y*5
sim.setJointTargetVelocity(right_slider_r2,Y)
elseif position_S[2] > 0.1 then
if X <= -0.05 then
sim.setJointTargetVelocity(right_joint_r2,-5)
elseif X > -0.05 then
sim.setJointTargetVelocity(right_joint_r2,5)
end
Y2 = Y2*5
sim.setJointTargetVelocity(right_slider_r2,Y2)
end
end
桿子位置 = 模擬得到物件位置(處理的物件 , -1啟動)。
球的位置 = 模擬得到物件位置(處理的物件 , -1啟動)。
X = 球的位置 - 桿件的位置 (在X軸上)。
Y = 球的位置 - 桿件的位置再+ 0.1(在Y軸上)。
Y2= 球的位置 - 桿件的位置再 - 0.1(在Y軸上)。
if (假設X>= -1 = true ) then (接著)
{ if (假設球在Y軸時 <= 0.1 = true) then (接著)
[ if (假設X <= -0.05時 = true) then (接著)
模擬設定軸的目標速度(處理後的物件 , 速度大小(負號為方向))
elseif (額外假設X> -0.05時 = true ) then (接著)
模擬設定軸的目標速度(處理後的物件 , 速度大小)
end (結束此迴圈) ]
Y = 上方Y在Y軸的位置差*5倍
模擬設定的目標速度(處理後的物件 , Y的追蹤速度大小)
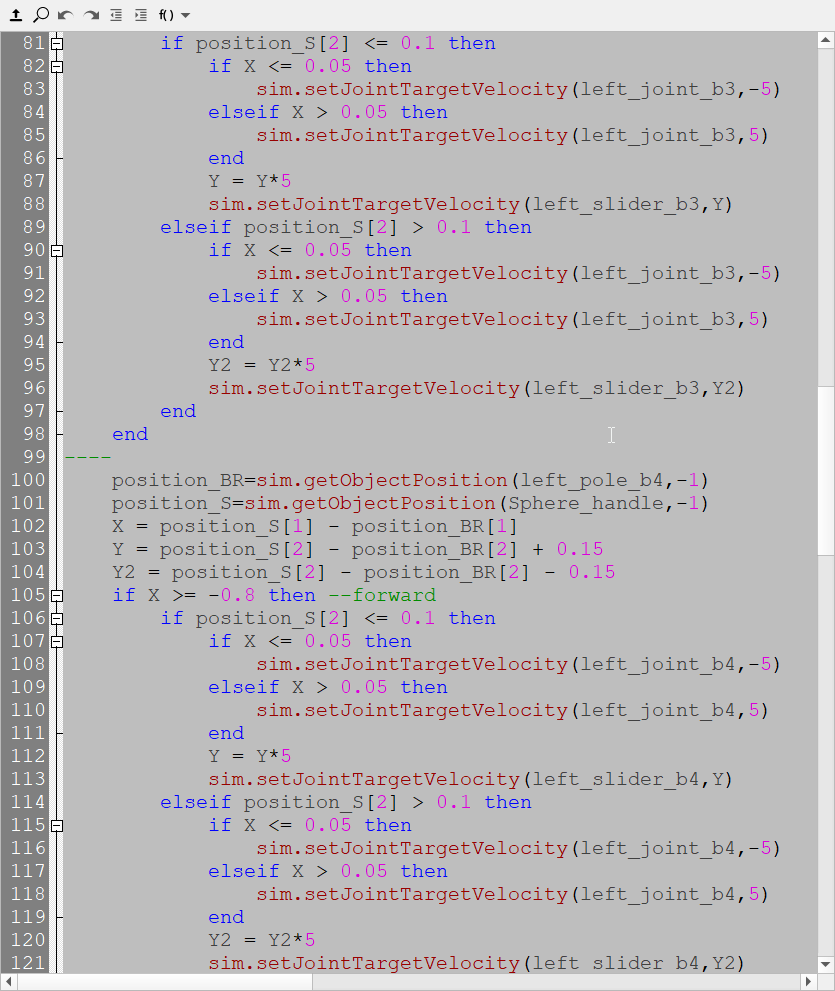
elseif (額外假設求在Y軸上 > 0.1) then (接著)
[ if (假設X <= -0.05時 = true) then (接著)
模擬設定軸的目標速度(處理後的物件 , 速度大小(負號為方向))
elseif (額外假設X> -0.05時 = true ) then (接著)
模擬設定軸的目標速度(處理後的物件 , 速度大小)
end (結束此迴圈) ]
Y2 = 上方Y2 在Y軸位置差* 5倍
模擬設定軸的目標速度(處理後的物間 , 上方 Y2 追蹤的速度大小)
end (結束此迴圈) }
end(結束迴圈)。
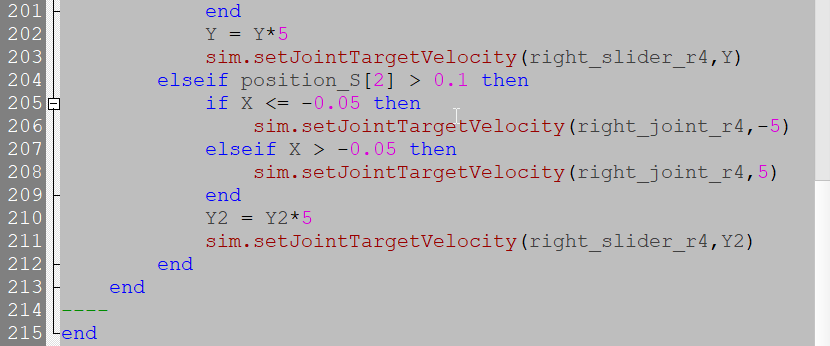
守門員的程式與其他人的程式相差是在於,我設定的X軸跟Y軸的位置差所針對的部分是球的型心與桿子的型心所做的位置差,所以為了避免有空踢的可能性,所以必須在後衛、中場、前鋒上給予在Y軸上的彌補,其用意除了在空踢以外,還要避免當球員道極 限位置時要求另一個球員要去踢球,所以在第一大迴圈中給的X要>= -1是要求球員要在X軸為 1 的範圍內可以判定球的X軸在哪,第二個迴圈中,用球的Y軸 <=0.1時,要求Y的設定之人偶去追蹤球,額外的假設是當球的Y軸>0.1時,要求Y2的設定之人偶去追蹤球,第三迴圈,相對簡單,先告訴它假設 X < -0.05 時,要求欲踢狀態,額外假設X>-0.05 時,要求踢擊狀態,這是三層迴圈的內部定義。
human and computer << Previous Next >> Object setting step